Az EV3 hardvere
0:54 perc
1:30 perc
3:51 perc



EV3 tégla – "agy"
A Mindstorms robotkészlet „agya” egy intelligens, programozható tégla (brick), melynek négy bemenetére szenzorok (érzékelők), kimeneteire pedig szervomotorok csatlakoztathatók. Az eredmények megjelenítésére egy monokróm LCD grafikus kijelző szolgál. Megépítünk egy robotkonstrukciót, amely tartalmazza a téglát, csatlakoztatunk hozzá szenzorokat és motorokat. Számítógépen elkészítjük a célnak megfelelő programot, amely a szenzorok által érzékelt adatok alapján döntéseket hoz a szükséges tevékenységről, amelyet a robot a motorjai segítségével végrehajt. A programot USB kábelen, bluetoothon vagy wifin keresztül a robotra töltve az már önállóan viselkedik a programja utasításai alapján.
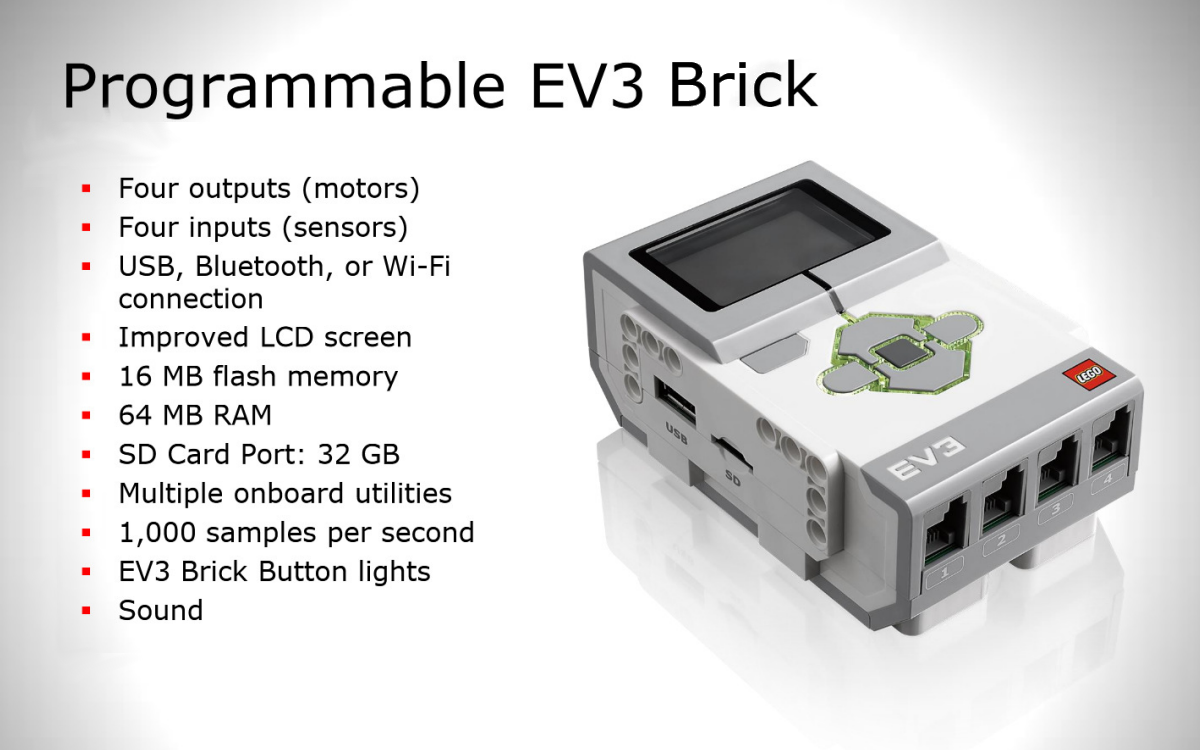
A tégla/brick főbb tulajdonságai
- 300 MHz-es, Linux alapú ARM9-es mikrokontroller
- 64 MB RAM
- 16 MB flash memória
- SD kártya port: max. 32 GB
- 4 kimeneti port (A,B,C,D motoroknak)
- 4 bemeneti port (1,2,3,4 szenzoroknak)
- USB, bluetouth vagy WiFi csatlakozás
- javított LCD képernyő (monokróm, 178x128 pixel)
- 6 kezelőgomb (vezérléshez, programozáshoz)
- jelzőfények (zöld,piros,narancs LED-ek) a tégla gombjainál
- több alaplapi segédprogram
- 1000 minta per másodperc
- hang adása (hangszóró)
- áramforrása: 6db 1,5 V-os AA/LR6 elem, vagy saját akkumulátor
EV3 motorok – "izmok"
A robot szervomotorok segítségével valósítja meg a különböző mozgásokat. A készletben két különböző felépítésű motor található. A közepes motor forgási tengelye párhuzamos a motor hosszanti tengelyével (Medium Motor), míg a nagy motor forgási tengelye merőleges a hosszanti tengelyre (Large Motor). Mind a nagy, mind a közepes motorok belső forgásérzékelőkkel vannak felszerelve. A forgásérzékelőt arra használják, hogy mérje, hogy a motor milyen mértékben fordult el. A forgásérzékelők képesek a fokozatokban vagy a teljes fordulatokban elforduló forgás érzékelésére. A forgásérzékelő használatával megtudhatja, hogy a motor melyik teljesítményszinten van.
EV3 Large Motor

nagy motor
(large motor)
EV3 Medium Motor

közepes motor
(medium motor)
NXT Motor

szervo motor
(servo motor)
EV3/NXT szenzorok – "érzékszervek"
Az EV3 robot érzékszervei a szenzorok, amelyek képesek a környezet mérhető adatainak észlelésére, figyelésére. (A második generációs NXT robot néhány szenzora is használható.) A robot érzékelők segítségével reagálhat a megérintésre, reagálhat, ha valaki vagy valami túl közel van hozzá, mérheti, hogy mennyire fordult el, mérheti környezete fényességét, színét, hőmérsékletét, stb.
Szín- vagy fényérzékelő (Colour Sensor)
Két üzemmódja van: az Összehasonlító (Compare) és a Változás (Change) üzemmód. Mindegyikben három lehetőség közül választhatunk. Használhatjuk a fényszenzorként (Light) vagy színszenzorként (Colour). Fényszenzor üzemmódban eldönthetjük, hogy a szenzor saját fényével (vörös színű) világítsuk-e meg a felületet, vagy a környezet fényét érzékeljük (saját fény nélkül). Ez a Reflected Light illetve az Ambient Light funkció.
Giroszkóp (Gyro sensor)
A giroszenzor képes a robot előjeles elfordulását mérni fokokban. Az előjeles elfordulás értékének viszonyítási pontja a szenzor Reset állapota. (Amiben eltér például a motorok elfordulási szögének mérésétől, hogy míg azok a motor tengelyének elfordulását mérik, és ezáltal csak közvetve kapunk információt a robot tényleges fordulásáról, addig a giroszenzor a robot tényleges fordulását méri.)
Ütközésérzékelő (Touch sensor)
Az ütközésérzékelő három állapot megkülönböztetésére alkalmas:
- Released – az ütközésérzékelő gombja kiengedett állapotban van;
- Pressed – az ütközésérzékelő gombja benyomott állapotban van (ez az alapbeállítás);
- Bumped – az ütközésérzékelő gombjának gyors benyomása, egérkattintásszerűen. Az érzékelő gombján állapotváltozás megy végbe, először benyomás, majd felengedés.
Ultrahangos távolságérzékelő (Ultrasonic sensor)
A szenzor képes az előtte lévő tárgyak távolságát megmérni. A távolságot mindig az érzékelőhöz viszonyítva határozza meg centiméterben vagy hüvelykben mérve. A távolságot 5-255 cm tartományban képes megmérni. Ez úgy történik, hogy magas frekvenciájú hanghullámokat küld, amelyek visszaverődnek az előtte lévő objektumokból, és méri mennyi idő kell a visszaéréshez. (A szoftverben kiválaszthatja, hogy a távolság centiméterben vagy hüvelykben legyen megadva.)
Colour/Light

szín- vagy fényérzékelő
(color / light sensor)
Gyro

gyorsulásmérő (giroszkóp)
(gyro sensor)
Touch

ütközésérzékelő
(touch sensor)
Ultrasonic

ultrahangos távolságérzékelő
(ultrasonic sensor)
Infrared/distance

infravörös érzékelő
(infrared sensor)
Temperature

hőmérsékletmérő
(temperature sensor)
Sound

hangérzékelő
(NXT sound sensor)
Force

erő érzékelő
(NXT force sensor)
Compass

iránytű
(NXT compass sensor)
Beacon

infravörös jeladó
(EV3 infrared beacon)